
工業機器人固定工具測量
一、工業機器人固定工具測量概要
1、固定工具的測量分為2步:
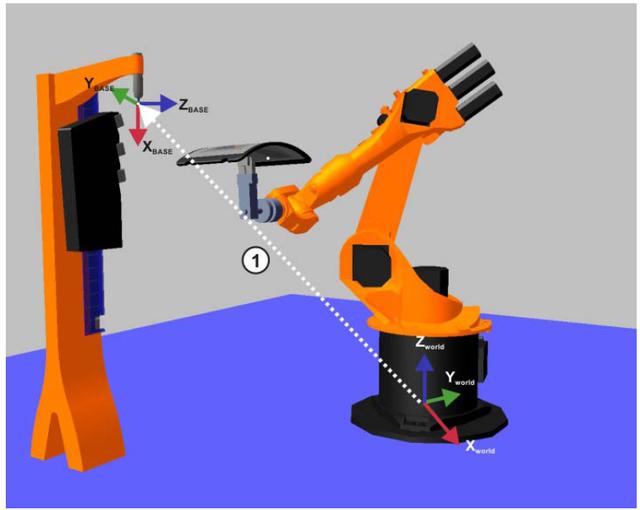
(1)確定固定工具的外部TCP和世界坐標系原點之間的距離。
(2)根據外部 TCP 確定該坐標系姿態。
如圖所示,以 $WORLD (或者 $ROBROOT)為基準管理外部TCP,即等同于基坐標系。
二、測量說明:
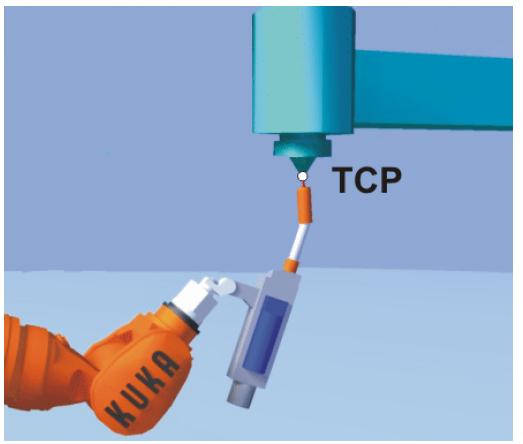
1、確定TCP時需要一個由機器人引導的已測工具。
2、確定姿態時要將法蘭的坐標系校準至平行與新的坐標系。 有兩種方式:
(1)5D: 只將固定刀具的作業方向告知機器人控制器。該作業方向被默認為 X 軸。其它軸的姿態將由系統確定,對用戶來說,不是很容易地就能識別。
(2) 6D: 所有3個軸的姿態都將告知機器人控制系統。測量說明確定 TCP時需要一個由機器人引導。
三、操作步驟
1、在主菜單中選擇投入運行 > 測量 > 固定工具 > 工具。
2、為固定工具指定一個號碼和一個名稱。用繼續鍵確認。
3、輸入所用參考工具的編號。用繼續鍵確認。
4、在5D/6D 欄中選擇一種規格。用繼續鍵確認。
5、用已測量工具的TCP移至固定工具的TCP。點擊測量。用以確認位置。
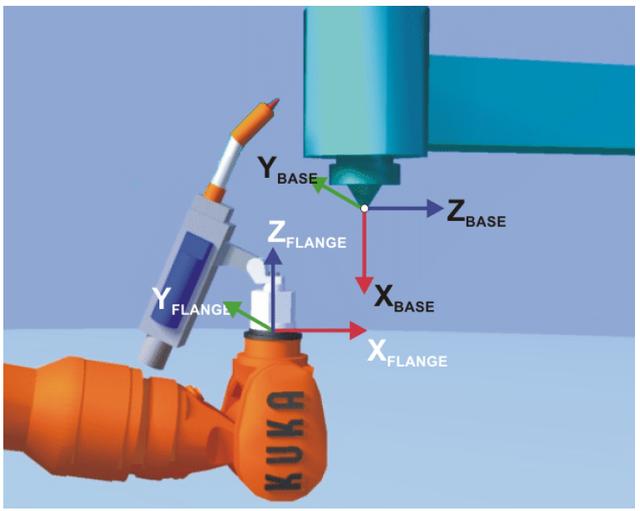
6、如果選擇了5D:將 +X 基坐標系平行對準 -Z 法蘭坐標系。(也就是將連接法蘭調整成與固定工具的作業方向垂直。)如果選擇了6D:應對連接法蘭進行調整,使得它的軸平行于固定工具的軸:
(1)+X 基坐標系平行于 -Z 法蘭坐標系(也就是將連接法蘭調整成與工具的作業方向垂直。)
(2) +Y 基坐標系平行于 +Y 法蘭坐標系
(3) +Z 基坐標系平行于 +X 法蘭坐標系
7、點擊測量。 用是確認位置。
8、按下保存鍵。
1、固定工具的測量分為2步:
(1)確定固定工具的外部TCP和世界坐標系原點之間的距離。
(2)根據外部 TCP 確定該坐標系姿態。
如圖所示,以 $WORLD (或者 $ROBROOT)為基準管理外部TCP,即等同于基坐標系。
二、測量說明:
1、確定TCP時需要一個由機器人引導的已測工具。
2、確定姿態時要將法蘭的坐標系校準至平行與新的坐標系。 有兩種方式:
(1)5D: 只將固定刀具的作業方向告知機器人控制器。該作業方向被默認為 X 軸。其它軸的姿態將由系統確定,對用戶來說,不是很容易地就能識別。
(2) 6D: 所有3個軸的姿態都將告知機器人控制系統。測量說明確定 TCP時需要一個由機器人引導。
三、操作步驟
1、在主菜單中選擇投入運行 > 測量 > 固定工具 > 工具。
2、為固定工具指定一個號碼和一個名稱。用繼續鍵確認。
3、輸入所用參考工具的編號。用繼續鍵確認。
4、在5D/6D 欄中選擇一種規格。用繼續鍵確認。
5、用已測量工具的TCP移至固定工具的TCP。點擊測量。用以確認位置。
6、如果選擇了5D:將 +X 基坐標系平行對準 -Z 法蘭坐標系。(也就是將連接法蘭調整成與固定工具的作業方向垂直。)如果選擇了6D:應對連接法蘭進行調整,使得它的軸平行于固定工具的軸:
(1)+X 基坐標系平行于 -Z 法蘭坐標系(也就是將連接法蘭調整成與工具的作業方向垂直。)
(2) +Y 基坐標系平行于 +Y 法蘭坐標系
(3) +Z 基坐標系平行于 +X 法蘭坐標系
7、點擊測量。 用是確認位置。
8、按下保存鍵。
- 上一篇:四軸機器人和六軸機器人 2017/12/26
- 下一篇:工業機器人的驅動機構和驅動系統 2017/12/26